Ciencias Informáticas/Informative Sciences
Cienc Tecn UTEQ (2020) 13(1) p 105-112
ISSN 1390-4051; e-ISSN 1390-4043
Propuesta de prototipo de robot aspiradora de bajo costo y alta tecnología aplicado a
procesos de limpieza de baja escala
Proposal of prototype of low cost and high technology vacuum robot applied to small scale cleaning processes
Andrade Salazar Milton Temistocles1, Bastidas Chalan Rodrigo Vladimir1, Benavides Astudillo Diego Eduardo1, Alberto
Daniel Núñez Agurto1
1 Universidad de las Fuerzas Armadas ESPE
mtandrade@espe.edu.ec
Rec.: 19.03.2019. Acept.: 21.01.2020.
Publicado el 30 de junio de 2020
Resumen
Abstract
ste trabajo de investigación tiene como objetivo
his research work has as main objective to improve
E
principal mejorar el estilo de vida de las personas,
T
the lifestyle of people, especially those who have
especialmente de quienes tienen algún tipo de
some type of physical disability, and for that reason
discapacidad física, y por tal razón se les hace muy
it is very complicated to carry out cleaning activities.
complicado realizar actividades de limpieza. Para
To achieve this goal, the prototype of a self-contained
cumplir con este objetivo, se ha creado el prototipo de
robotic vacuum called YOLIMPIO has been created to
una aspiradora robótica autónoma llamada YOLIMPIO,
perform a small-scale cleaning process in homes and
para realizar proceso de limpieza a baja escala en los
offices. For this purpose, artificial intelligence hardware
hogares y oficinas. Para este propósito, se utilizaron
and software, used in robotics, were used. In terms of
hardware y software de inteligencia artificial, manejados
hardware, Arduino electronic boards, motion sensors,
en robótica. En cuanto a hardware, para el mecanismo
cameras and other low-cost devices were used for the
de movimiento se utilizó placas electrónicas Arduino,
movement mechanism. As for the software, the one
sensores de movimiento, cámaras y demás dispositivos
that was embedded in the Arduino boards was used,
de bajo costo. En cuanto al software, se utilizó el que
by means of which each of the electronic components
viene embebido en las placas Arduino, por medio del
was configured and programmed. For the trial and error
cual se configuraron y programaron cada uno de los
stage, the PROTEUS simulator was used. Already in the
componentes electrónicos. Para la etapa de prueba y
test stage it is verified that the vacuum cleaner by means
error, se utilizó el simulador PROTEUS. Ya en la etapa
of sensors, can detect and absorb the waste scattered on
de prueba se constata que la aspiradora por medio de
the floor, can detect if it is close to an obstacle or next to
sensores, puede detectar y absorber los desperdicios
an end of the track or firm floor, if there is no more trash
esparcidos en el piso, puede detectar si está próxima
to pick up, if it is with low energy level it will go to the
a un obstáculo o próxima a un final de pista o piso
power source to recharge as many times as necessary.
firme, si ya no hay basura para recoger, si está con bajo
In conclusion, it can be affirmed that with free software
nivel de energía se dirigirá a la fuente de energía para
and low cost hardware, available in the market, a high-
recargarse las veces que sea necesario. En conclusión,
tech service robot with a high social impact can be built.
se puede afirmar que con software libre y hardware de
bajo costo, disponible en el mercado, se puede construir
Keywords: Service Robot, prototyping, Technology
un robot de servicio de alta tecnología y de alto impacto
Arduino, Proteus Simulator.
social.
Palabras clave: Robot de servicio, prototipado,
Tecnología Arduino, Simulador Proteus.
105
Andrade et al., 2020
Introducción
“YOLIMPIO”, se utilizó hardware y software de
inteligencia artificial, utilizados en robótica. En el
egún la O.M.S. (Organización Mundial de Salud),
hardware, para el mecanismo de movimiento se utilizó
S
el 15% de la población mundial está afectada por
placas electrónicas Arduino, sensores de movimiento,
alguna discapacidad física, psíquica o sensorial que
cámaras y demás dispositivos de bajo costo. En cuanto
dificulta el desarrollo personal y su integración social,
al software, se utilizó el que viene embebido en las
educativa o laboral. Tal porcentaje equivale a
900
placas Arduino, por medio del cual se configuraron y
millones de personas, casi el doble de la población de
programaron cada uno de los componentes electrónicos.
Latinoamérica. “Hemos entrado en una era emocionante
Permitiendo de esta manera detectar y absorber los
y dramática en la cual la tecnología, especialmente la de
desperdicios esparcidos en el piso, puede detectar si está
los robots, no sólo incrementará nuestras capacidades
próxima a un obstáculo o próxima a un final de pista o
humanas sino que bien podría remplazarlas por
piso firme, si ya no hay basura para recoger, si está con
completo.” (McCloy, 1984, p. 18). Para implementar
bajo nivel de energía se dirigirá a la fuente de energía
robots exige tener conocimientos multidisciplinares,
para recargarse las veces que sea necesario; además tiene
puesto que se incursiona en la mecánica, sensores,
una navegación autónoma debido a la implementación
motores, comunicaciones, electrónica, e inteligencia
de un algoritmo el cual permite moverse a la aspiradora
artificial. La idea central de esta investigación es cumplir
en un entorno desconocido
de a poco con la visión de un mundo en el que el trabajo
El presente documento está estructurado de la
de los seres humanos pudiera ser reemplazado por el
siguiente manera: En la sección
2 se presenta los
de los robots, proclamada por los expertos en robótica
materiales y métodos utilizados en el diseño del
desde hace tiempo (Moravec, 1999). La robótica móvil
prototipo de
“YOLIMPIO”. Y en la Sección 3 se
es un área de la robótica en general que en la actualidad
presentan los resultados y discusión, donde se deja
tiene un intenso estudio por la comunidad científica
entrever que con software free y componentes de bajo
debido a las innumerables aplicaciones y servicios que
costo se pueden obtener aspiradoras con iguales o
ofrece. “Los avances de la robótica hacen posible el
mejores características que las existentes en el mercado.
desarrollo de sistemas cada vez más capaces, dotados
de sensores que le permiten actuar de manera autónoma
Materiales y métodos
para un gran número de aplicaciones” (Gómez, 2006).
La robótica se apoya en gran medida en los ingentes
n primera instancia se realizó un estudio profundo
progresos de la microelectrónica y la microinformática,
E
de la documentación existente sobre aspectos
así como también en nuevas disciplinas como
que involucra el proyecto, se analizaron ventajas y
reconocimiento de formas y la inteligencia artificial.
desventajas que conllevaría implementar el proyecto,
Las aspiradoras autónomas o robóticas ya existen, no
qué es lo que se podía mejorar con relación a las
es nueva la incursión en este mundo, pues desde el
aspiradoras robóticas existentes, y qué es lo que quedaría
año 2001 ya han aparecido varios modelos que se han
por investigar en futuros proyectos similares a este.
desarrollado a la sombra del mercado; y ya hay empresas
Para la parte de ingeniería en particular se utilizó
que la comercializan desde hace algún tiempo, así están
el Proceso Unificado Racional o RUP de sus siglas
las aspiradoras robóticas Roomba, Vacuum Clear,
en Ingles, este facilitará el modelado de los artefactos
Ubot, entre otras, pero por ser comerciales y utilizar
que constituyen los elementos de hardware y software
componentes de hardware y software propietarios
del robot. También se hizo uso de la metodología de
resultan muy elevados sus costos, por lo que no todas
prototipado, puesto que en el diseño de la aspiradora
las personas puedan adquirir una de ellas.
robot, se tenía que ir pasando por varias etapas, la última
Siendo consecuentes con la sociedad en general y
etapa mejoraba a la anterior. El proyecto se divide en
conociendo las consecuencias que conlleva hacer la
dos partes:
limpieza manualmente en casa u oficina, como es: tiempo,
Parte electromecánica
dolor de espalda, cansancio, estrés; se propone diseñar e
La parte del diseño empieza por tener una base
implementar una aspiradora robótica “YOLIMPIO” con
de acrílico la cual tiene una forma circular y donde
hardware y software free de tecnología ARDUINO, y
descansará el resto de accesorios; esta base estará
de esta manera conseguir un producto terminado con
soportada en las ruedas las cuales permiten el
las mismas o mejores características que las aspiradoras
movimiento de la aspiradora. Para el mecanismo de
comerciales pero a menor costo; consecuentemente
movimiento se utilizó los motores, además se colocaron
beneficiando a personas que tengan algún tipo de
los sensores que permitirán tomar otra dirección en caso
discapacidad física a tener un mejor estilo de vida.
de detectar un obstáculo, o a su vez si detecta el vacío.
En el diseño del prototipo de la aspiradora
Para la construcción de YOLIMPIO se utilizó
106
Ciencia y Tecnología. 2020. 13(1):105-112
Propuesta de prototipo de robot aspiradora de bajo costo y alta tecnología aplicado a procesos de limpieza de baja escala
planos detallados de los mecanismos y de los circuitos
eléctricos y electrónicos que se constituirán en el
organismo artificial del robot.
El hardware lo componen; sensores digitales que
detectará cuando por alguna situación se produzca un
choque y el robot tendrá que ejecutar un algoritmo que
le permita salir de tal situación; los sensores infrarrojos
que se utilizaron para detectar desniveles y prevenir
que se caiga el robot, los sensores ultrasónicos que se
utilizaron para detectar y evitar obstáculos; además se
utilizaron sensores ópticos y acústicos para detectar el
grado de suciedad y en base a ello activar un programa
de limpieza especial. Una placa Arduino UNO Rv3, la
cual nos permitirá manipular y controlar los sensores;
Figura 1. Transmisor RF XBEE XB24CZ7WIT-004
Módulo driver Puente HG7881 que permite controlar
Fuente: Digi-Key. (2019)
los motores de cada rueda. Una rueda “loca” que sirve
de soporte de la parte posterior del robot; cable unifilar
para realizar las conexiones entre ARDUINO y el
robot; las baterías que es un elemento importante para
el funcionamiento del robot. El sistema de aspirado que
está compuesto por una serie de cepillos, el depósito de
la suciedad, el filtro cuya función es recoger el polvo
y las partículas más pequeñas de suciedad durante la
aspiración.
Debido al consumo energético que se requiere
al realizar el proceso de limpieza, se implementa un
sistema que permite recargar las baterías mediante un
cargador inalámbrico comercial (120 Vac-6 Vdc) en la
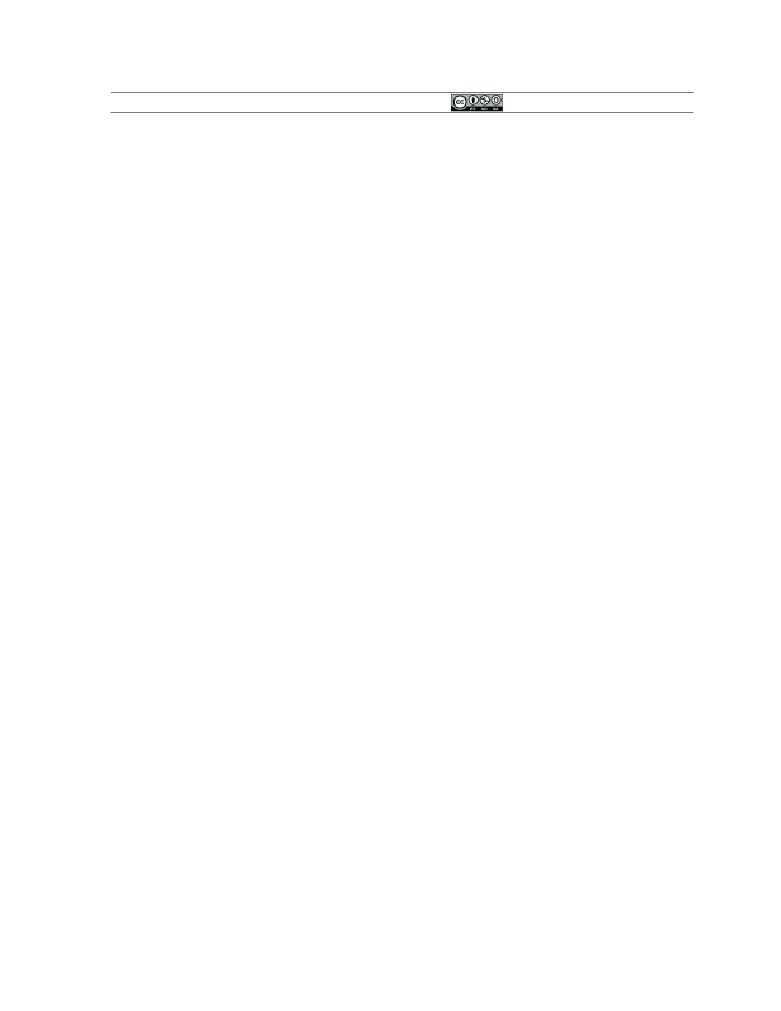
Figura 2. Componentes de la placa Arduino UNO Rv3
aspiradora y cualquier tomacorriente del lugar donde
Fuente: Isaac. P. (2014)
se haga la limpieza. Para aumentar la eficiencia del
cargador, se instala un transmisor de radiofrecuencia
La placa de la figura 2, es la más extendida y que es
XBee (alcance 120m), ver figura 1, el cual permite
suficiente para llevar a cabo varios tipos de proyectos
ubicar y acercarse a la aspiradora lo más cerca posible
mecatrónicas. Se basa en un microcontrolador Atmel
al transmisor del cargador inalámbrico.
ATmega320 de 8 bits a 16Mhz que funciona a 5v.
La segunda opción para cargar las baterías, sería
32KB son correspondientes a la memoria flash (0,5KB
usar un rectificador (120 Vac-6 Vdc) y el transmisor
reservados para el bootloader), 2KB de SRAM y 1KB
de radio frecuencia XBee. Sin embargo, físicamente, se
de EEPROM. En cuanto a memoria es una de las placas
debería acoplar con un enchufe al tomacorriente con un
más limitadas, pero no por ello resulta insuficiente
sistema electromecánico que acople milimétricamente.
para casi todos los proyectos que rondan la red. Las
Debido a que la altura de los tomacorrientes varía, el
salidas pueden trabajar a voltajes superiores, de entre
enchufe que se ubicaría en la aspiradora debería contar
6v y 20v pero se recomienda una tensión de trabajo de
con un sistema elevador, para desplazarlo verticalmente
entre 7v y 12v. Contiene 14 pines digitales, 6 de ellos
y que se ajuste al enchufe.
se pueden emplear como PWM (modulación por ancho
En cualquiera de los sistemas a utilizar, también
de pulsos). En cuanto a pines analógicos se cuenta con
se debe contar con transformadores de corriente y
hasta 6. Estos pines pueden trabajar con intensidades de
de voltaje para monitorear corriente y voltaje en las
corriente de hasta 40mA.
baterías, ya que esa sería la condición que le permita
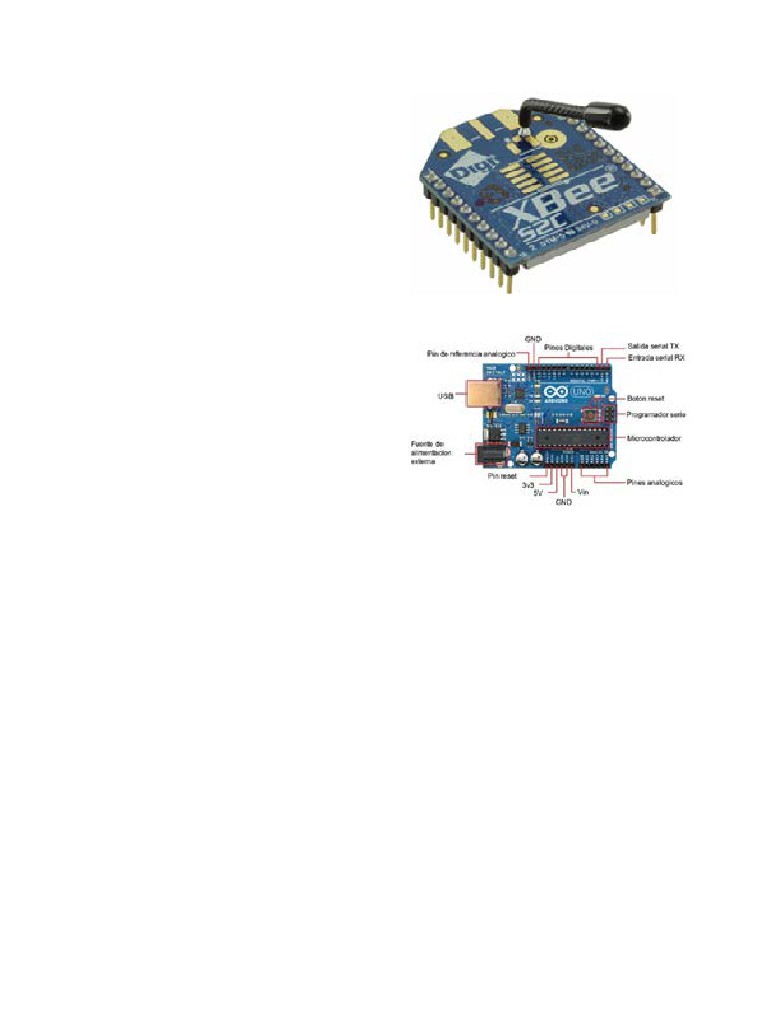
El controlador de motores o Módulo driver Puente
a la aspiradora acercarse al transmisor del cargador
HG7881, ver figura 3, es requerido por cuanto la placa
inalámbrico. Como la aspiradora cuenta con sensores
Arduino no puede gestionar o controlar directamente
ultrasónicos no existe riesgo de colisión con la pared y
motores de corriente continua. Los motores de cc que
siempre se deberá acercar la aspiradora por el lado del
se utilizan son dos y funcionan perfectamente con 6v y
receptor del cargador inalámbrico.
unos 300mA cada uno, por lo que entre los dos motores
necesitamos 600mA. El controlador HG7881 funciona
entre 2,5v y 12v, con intensidades de 800mA energía
Ciencia y Tecnología. 2020. 13(1):105-112
107
Andrade et al., 2020
suficiente para controlar los dos motores de las llantas.
Figura 3. Descripción controlador HG7881
Fuente: Isaac. P. (2014)
También tenemos un motor de cc de 6v y 2A que
“YOLIMPIO”.
estará encargado de mover las aspas del ventilador; y
un motor de cc de 4v y 2A el cual ayudará al sistema
de cepillos que recogerán la basura que encuentre en
su camino. Para el funcionamiento autónomo es muy
importante la colocación de las baterías para cada uno
de los motores implantados en la aspiradora.
Control de sensores y movimientos por medio de
programación Arduino (software)
Para una buena eficiencia en el aspirado, es
importante también el sistema de navegación empleado
por el robot. Generalmente el sistema de navegación
determina el nivel de “inteligencia” del robot aspirador.
Hay muchos robots de gama baja que carecen de sistema
de navegación. Sin embargo, en los modelos de gamas
medias y altas podemos encontrar variados sistemas.
El sistema de navegación es la vista en el aspirador,
permite crear un mapa de la habitación para controlar
las zonas que ya han sido limpiadas, y cuáles no.
También favorece un movimiento inteligente, evitando
movimientos innecesarios característicos de aspiradores
robóticos con patrones de movimientos prefijados. El
aspirador robótico
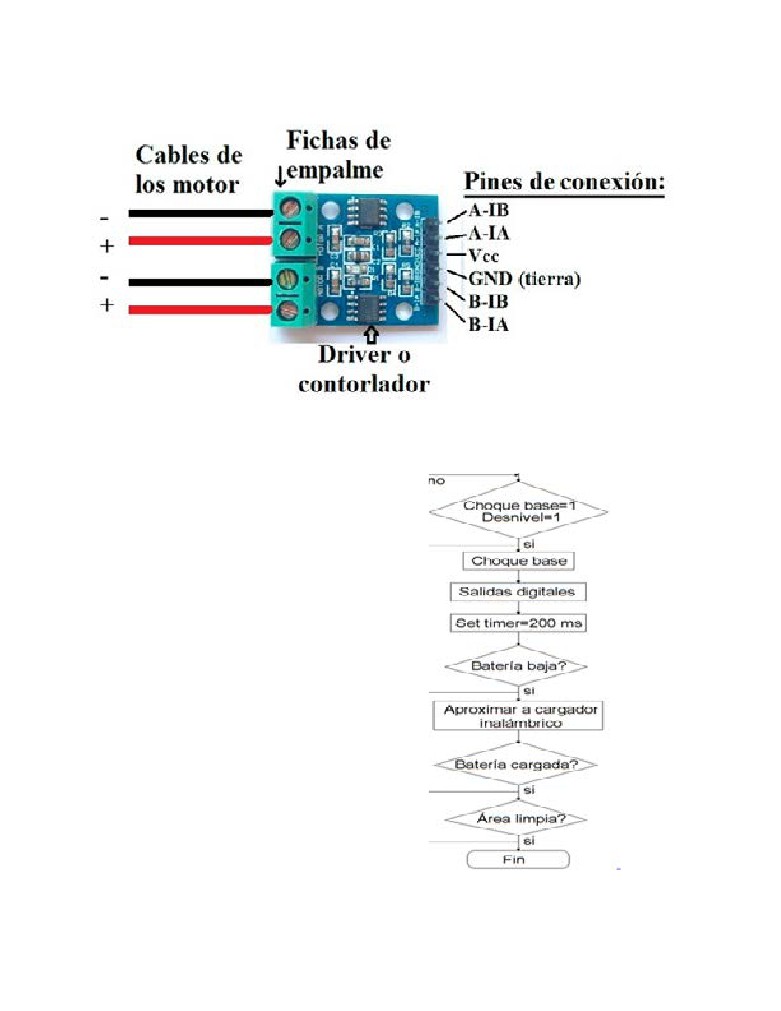
“YOLIMPIO” tiene programado
cinco tipos de navegación: espiral, zig-zag, seguimiento
de paredes, forma de S, y pentagonal. Se diseña el
algoritmo de las funciones que controlaran a cada uno
de los motores o actuadores; programar y codificar las
señales que son emitidas por cada uno de los sensores
implantados en la aspiradora.
Figura 4. Diagrama de flujo de algoritmo principal
En el siguiente diagrama de flujo queda
Fuente: Andrade (2019)
determinado el control general de la aspiradora robótica
108
Ciencia y Tecnología. 2020. 13(1):105-112
Propuesta de prototipo de robot aspiradora de bajo costo y alta tecnología aplicado a procesos de limpieza de baja escala
Resultados y discusión
free, tal como es la tecnología Arduino, con lo que el
producto terminado se lo obtiene con una inversión
a aspiradora “YOLIMPIO” es un robot resultado de
bastante accesible y nada comparado con la inversión
L
esta investigación y que puede actuar en entornos
de las aspiradoras robóticas comerciales.
diferentes; y en base a ello determinar su eficiencia.
A este prototipo se les puede hacer algunas mejoras,
Para la navegación se utilizó dos entornos diferentes:
como es el caso de la navegación del robot, donde
estructurado y desestructurado.
se le puede implementar más opciones, con lo que el
Entorno estructurado.- es una superficie de
espacio de memoria a utilizar sería mayor; y la placa
dimensiones determinadas donde el robot “YOLIMPIO”
Arduino Uno no nos ayudaría mayormente, para lo cual
debe hacer efectivo el proceso de aspiración. Por
se recomienda actualizar a una placa electrónica de más
regla general los fabricantes de estos tipos de robots
capacidad de almacenamiento como es la placa Arduino
incluyen mediciones que relacionan la superficie
Mega ATmega2560.
visitada por unidad de tiempo. Esta medida puede
Para la implementación del prototipo de la
facilitarse en porcentaje. Así el 90% de eficacia en 8
aspiradora robótica
“YOLIMPIO” fue necesario el
metros cuadrados en un tiempo de 30 minutos; supone
uso de varias disciplinas de la ingeniería, tales como
visitar 0.9*8=7,2 metros cuadrados de superficie en 30
la instrumentación, teoría de control, modelado
minutos. El entorno en esta situación suele ser cuadrado,
físico, programación, mecánica, electrónica, modelo
de dimensiones definidas, y libre de obstáculos. En estos
matemático, entre otras.
entornos la aspiradora alcanza una velocidad de 9,5cm/s
Entornos desestructurado.- en este entorno se
Conclusiones
pretende valorar de manera real y global el rendimiento y
comportamiento de la aspiradora “YOLIMPIO”; puesto
l
tener nociones básicas del Lenguaje de
que en este caso el entorno no está definido en forma, ni
E
programación C, es de gran ayuda para poder
en tamaño; y además presenta obstáculos como sillones,
entender y programar en Arduino; y por tanto desarrollar
camas, mesas, lugares con bajadas de escaleras.
el software de navegación de la aspiradora.
En ambos entornos la superficie sobre la que se
La tecnología Arduino al ser una plataforma de
puede desplazar la aspiradora es indistinta para su
código abierto, el hardware y software son flexibles y
funcionamiento.
fácil de manipular; no tiene límites, el límite lo ponen
Según el algoritmo programado el robot elije la
los investigadores.
trayectoria a seguir, todo dependerá de la opción que
desee el usuario. La basura recogida en el reservorio de
Bibliografía
la aspiradora puede ser extraída con facilidad para dar
mayor eficiencia al proceso de aspirado.
Armada, E. (2015). Robots. Madrid: CSIC Los Libros de la
El uso de baterías independientes para cada uno
Catarata.
de los procesos que realiza la aspiradora, proporciona
Cerón, A. (2009). Sistemas robóticos teleoperados. España:
mayor potencia en los actuadores del sistema de
Universidad Militar Nueva Granada.
locomoción, como en los actuadores de la barredora y
Corrales,
V.
(2006).
Electrónica
práctica
con
aspiradora.
Microcontroladores PIC. Quito: Imprenta Gráfica.
El tiempo de respuesta de los sensores ante los
Digi-Key. (2019). Módulos de transceptor RF. Recuperado
estímulos externos percibidos por los diferentes
de
sensores se los realiza en tiempo real, con un retardo de
digi-international/XB24CZ7WIT-004/602-1560-
200ms, es decir pasa este tiempo y la aspiradora ejecuta
ND/5322374
el algoritmo seleccionado.
Fusario, R.
(2012). Teoría de control para informáticos.
La aspiradora robótica “YOLIMPIO” es un prototipo
Buenos Aires: Alfaomega Grupo Editor.
que reúne muchas de las características que tienen las
García, C. (2012). Instalaciones domóticas. Barcelona: Cano
aspiradoras robóticas comerciales como iLife, Conga,
Pina, Ediciones Ceysa.
Hombot, Neato, Xiaomi, entre otras; pero estas al
García, F. (2014). Maquinas síncronas y máquinas de corriente
utilizar placas electrónicas propietarias y software con
continua. Madrid: Sección de Publicaciones de la Escuela
licencia, hacen que sus costos sean bastante elevados
Técnica Superior de Ingenieros Industriales, Universidad
con la consecuencia de que no muchas personas podrán
Politécnica de MadridDextra.
adquirir una de ellas. Para la construcción y elaboración
INTPLUS. (2019). SuperRobótica. Robótica fácil. Recuperado
del software del prototipo de la aspiradora robótica
“YOLIMPIO” se utilizaron tanto placas electrónicas
Isaac. P. (2014). Comohacer.eu. Análisis comparativo de las
como paquetes informáticos de libre distribución o
placas Arduino (oficiales y compatibles). Recuperado
Ciencia y Tecnología. 2020. 13(1):105-112
109
Andrade et al., 2020
de
arduino-oficiales-compatibles/
McCloy, D., Harris, D. & Duran, A. (1993). Robótica: una
introducción. México: Limusa Grupo Noriega Editores.
Moravec, H. (2000). Mere Machine to Transcendent Mind.
Barcelona: Oxford University Press
Orozco, J. (2000). Integración y fusión multisensorial en robots
móviles autónomos. City: Universidad Complutense de
Madrid.
Proyectos personales sobre plataformas libres.
(2013).
Notas sobre robótica, electrónica, sistemas operativos
y programación. Robot móvil básico controlado con
com/2013/12/24/robot-movil-basico-controlado-con-
arduino/
Reyes A.
(2004). Aprenda rápidamente a programar
Microcontroladores. Quito: Gráficas Ayerve.
Sánchez, E. (2012). Tecnología de los robots educativos.
Madrid: Ediciones Díaz de Santos.
110
Ciencia y Tecnología. 2020. 13(1):105-112